I know it’s not astroimaging related, but I decided to post the instructions I used to connect my Sky Commander digital setting circles to my Skywatcher USA 10″ collapsible dobsonian. This was mainly to test the forum system out and see how it goes.
Proceed at your own risk. This installation does require modification to the base board of your Skywatcher USA Dobsonian mount and it not a reversible operation. The 3D Printed parts have been designed by me for use on my Skywatcher USA 10″ Collapsible Dobsonian telescope with white base. No other Skywatcher mounts have been tested, but I suspect the 8″ and 10″ models will both be fine. The 12 – 16″ models may have different bolt patterns and you might not be able to follow these steps exactly. The 3D Printed parts can be downloaded from http://www.thingiverse.com/thing:1222085
Step 1 – Order the Sky-Watcher parts. I ordered two kits from http://www.skyeng.com. The two kits you need are SYS-XP-4000 ($410 at the time of this writing) and ALT-AZ-1000 ($60 at the time of this writing).
Step 2 – Got to Lowes or Home Depot at buy a single M10x1.5x40mm bolt. I got mine at Lowes for $0.92
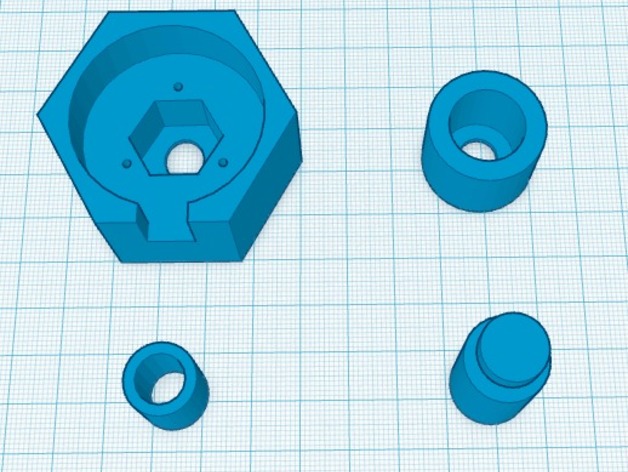
Step 3 – Print out the parts. There are 4 parts total in the file. They are 1 – ALT bearing coupler adapter, 2 – Base Bushing, 3 – ALT encoder arm base, 4 – ALT encoder arm insert. I printed mine in ABS at .2mm layers and 70% infill.
Step 4 – Base modification. Remove the optical tube and disassemble the baseboard from the base of the mount. Using a drill with a hole saw bit that matches the size of the Sky Engineering supplied base bearing, drill out the center hole for the new bearing. Be careful to keep the hole saw centered to avoid offset spinning in the AZ path. Even if it’s slightly offset it should not matter as long as the axis of rotation does not wobble.
Step 5 – Base reassembly. Re-assemble the mount base to the base board in the same manner as shown in the Sky Engineering manual page 48 (as of this writing) with one exception. Add the 3D printed base bushing to the nut before inserting it to remove the lateral slop that you would have without the bushing.
Step 6 – Assemble the ALT Bearing encoder coupler assembly. Place the M10x1.5x40mm bolt in the base of the ALT bearing coupler adapter. Screw the Sky Engineering supplied ALT coupler into the adapter by lining up the screw holes and the slot for the nylon lock screw.
Step 7 – Remove the right side T-handle from the ALT bearing and replace it with the ALT bearing encoder coupler assembly. Tighten as tight as you can with your hands. When you tilt the tube up and down, you should still see free spinning action for this bearing. This is critical for the encoder to read the ALT adjustments.
Step 8 – Remove the topmost right side allen bolt from the mount and insert it into the ALT encoder arm base and re-attach it to the mount.
Step 9 – Insert the ALT encoder arm insert into the recess of the ALT encoder arm base. This should be snug but hand removable.
Step 10 – Slide the end of the ALT encoder arm onto the notched part of the ALT encoder arm insert. Align and insert the ALT encoder shaft into the coupler and tighten down the nylon set screw.
Step 11 – Line up the end of the AZ encoder arm with the left or right side of the mount and insert the shaft into the AZ coupler in the base. Tighten the nylon set screw. In my case, the arm was the perfect length to reach the sidewalls of the mount without having any play and it did not bind the encoder.
Step 12 – Cable up the ALT and AZ encoders to the Sky-Commander unit.
Step 13 – Once you have confirmed everything is operational, route the cables as desired and attach the Sky-Commander to the desired location on the mount or OTA.